Overview
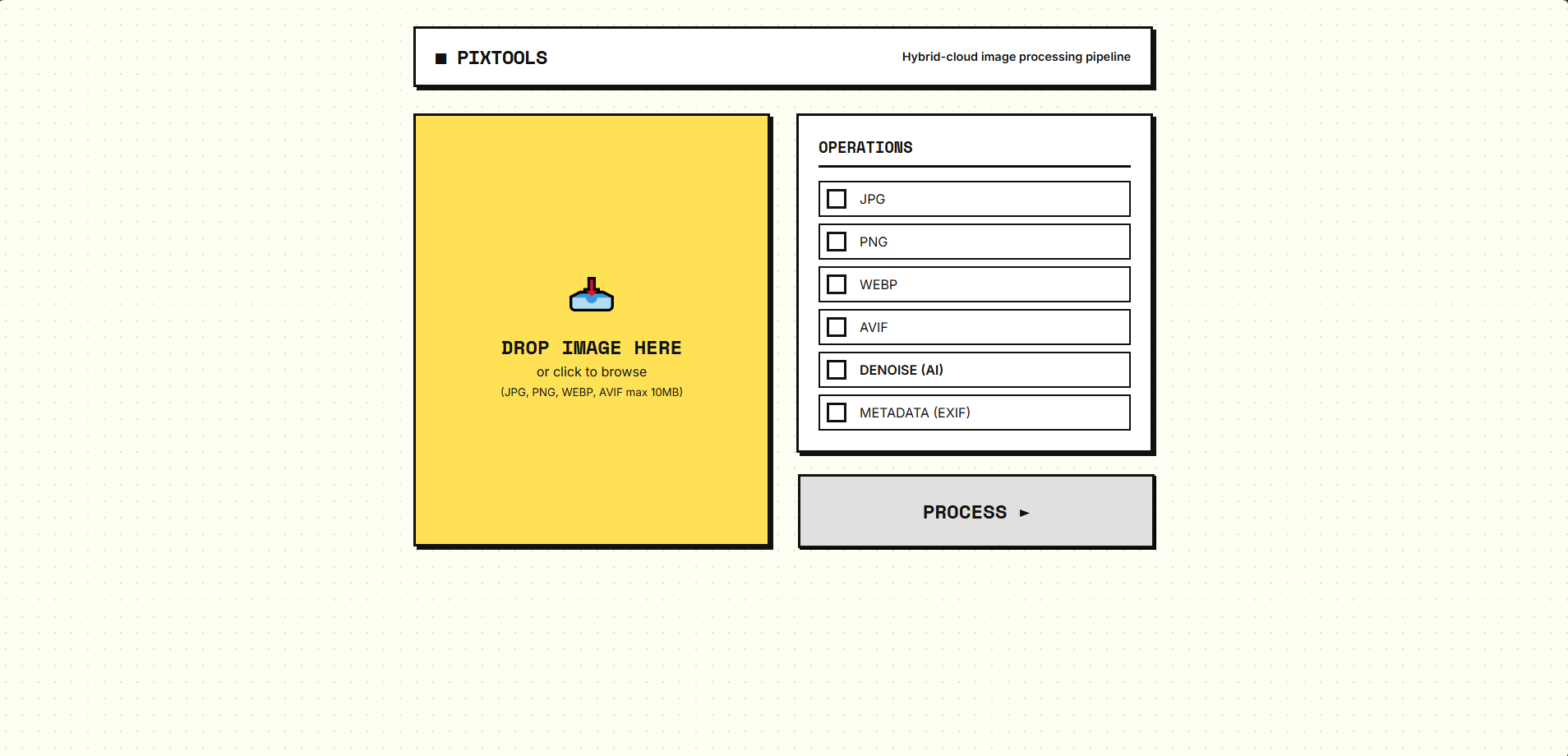
PixTools is a production-grade, distributed asynchronous image-processing system. Users upload images, choose operations (format conversion, DnCNN denoising, EXIF extraction), and receive outputs asynchronously when background processing completes.
The public HTTP edge is served by a Go API that validates requests, manages S3 uploads, writes Postgres job rows, checks Redis idempotency, and publishes Celery-compatible AMQP messages to RabbitMQ. The Python worker layer retains full ownership of pipeline orchestration, image processing, ML inference, metadata extraction, and archive generation.
The Scale-Up Struggle & Engineering Highlights
This system wasn't just deployed; it was architected to survive network drops, EC2 terminations, and infrastructure drift. Here are the real-world engineering challenges solved:
The Problem: The original unified K3s Auto Scaling Group used Spot Instances. When AWS inevitably reclaimed a spot instance under heavy ML load, it took down the control plane, RabbitMQ, and the API simultaneously. Deployments hung trying to resolve "Ghost Nodes".
The Fix: A massive dual-node re-architecture. The control plane, RabbitMQ, and Redis were moved to a stable, on-demand infra node. The API and Celery workers were pushed to a scalable array of Spot flex nodes, saving 70% in cost while ensuring the control plane always survived spot terminations.


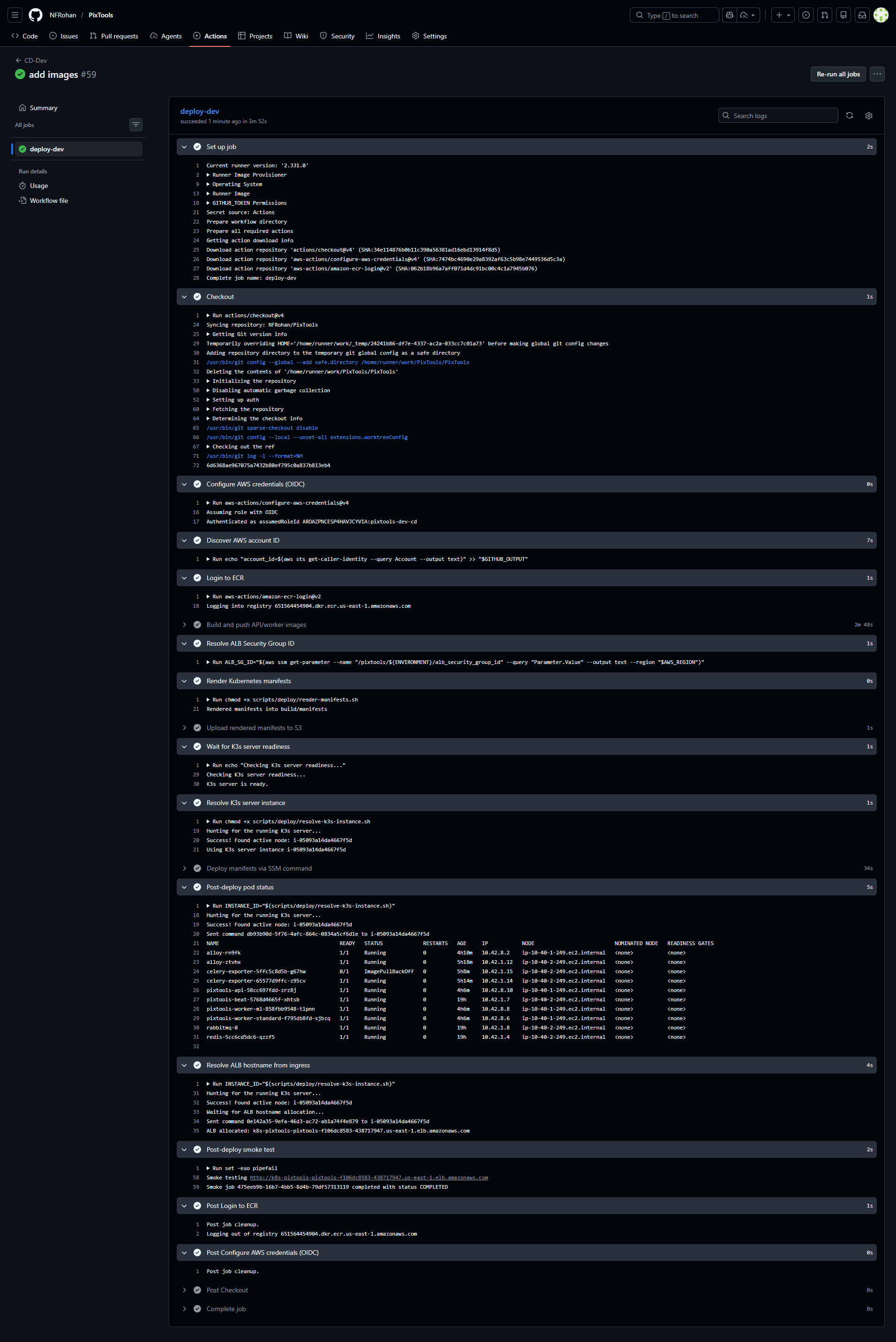
The Problem: Early CI/CD relied on hardcoded GitHub Secrets (e.g., ALB Security Group ID). When Terraform recreated these during architecture shifts, the pipeline natively broke trying to attach to ghost security groups.
The Fix: Fully dynamic state resolution. Terraform provisions and writes state directly into AWS Systems Manager (SSM) Parameter Store. GitHub Actions queries SSM at runtime, eliminating credential drift.
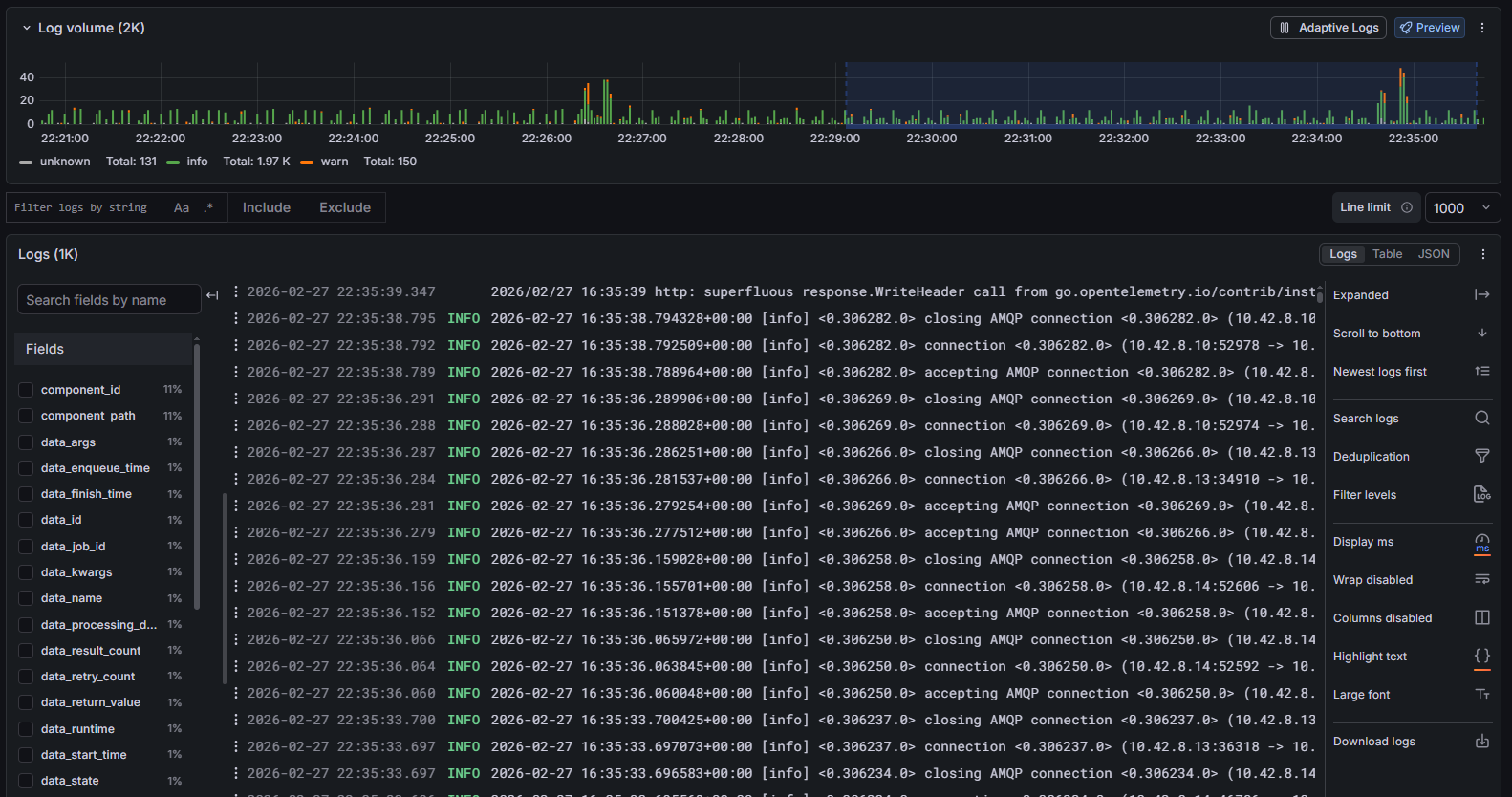
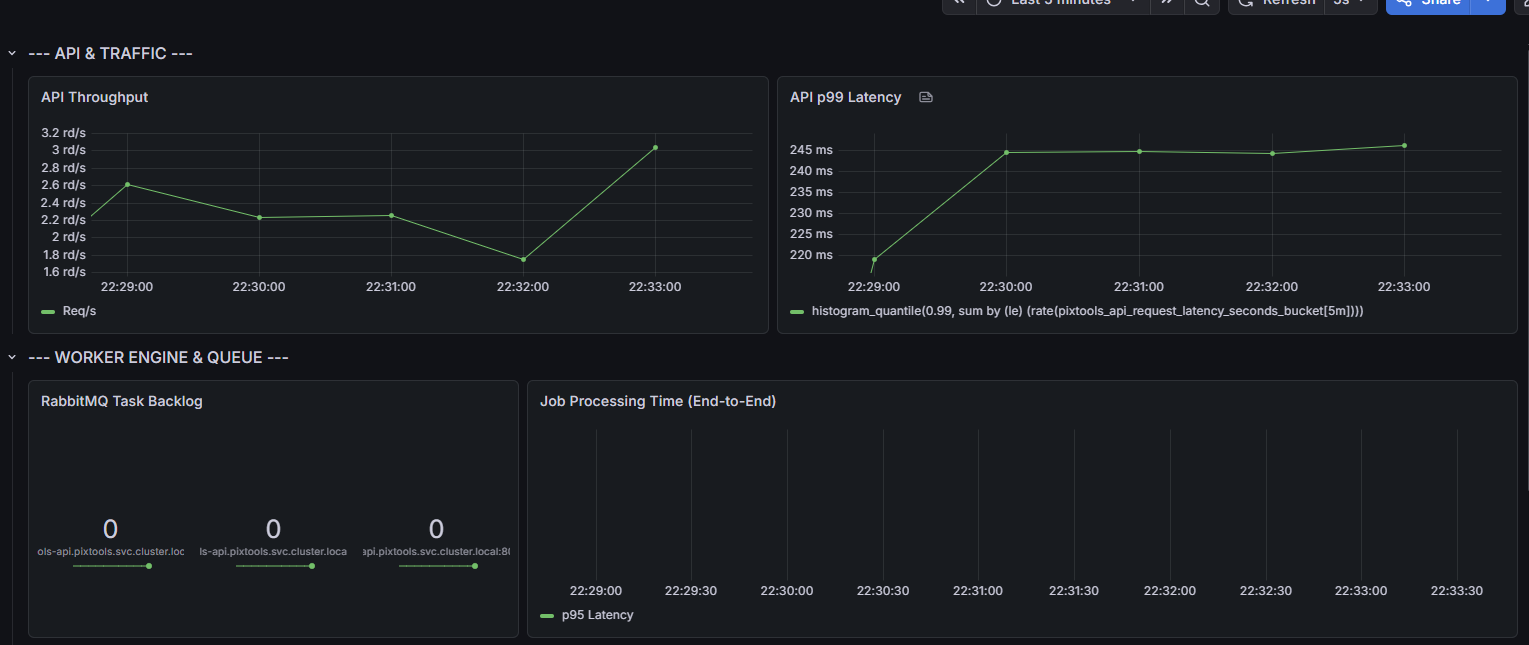
The Problem: Grafana dashboards showed processing times stuck at 0. The
API's /metrics endpoint was scraped perfectly by Alloy, but the API only queued
jobs; the actual Python workers had no embedded HTTP server to expose their metrics.
The Fix: Deployed a dedicated
celery-exporter container bridging worker queues and task completions directly
from RabbitMQ into Prometheus metrics, combined with enabling worker sent events.
The Problem: A hand-rolled bash script trying to kubectl drain
terminating spot instances frequently failed silently due to degraded networking during the
2-minute AWS warning window.
The Fix: Replaced it with the official AWS Node Termination Handler DaemonSet. Now, on a spot interruption notice, it cleanly cordons, taints, and evicts pods directly via the internal host network, guaranteeing zero dropped background jobs.
The Problem: The original FastAPI HTTP layer carried the full Python runtime and memory overhead just to validate requests, upload files to S3, write a job row, and enqueue background work. That was wasteful at the edge.
The Migration: I moved only the HTTP edge to
Go, keeping the Python worker system intact. Go now serves the frontend,
validates POST /api/process, writes the initial Postgres row, checks Redis
idempotency, uploads the raw file to S3, and publishes Celery-compatible AMQP messages to
RabbitMQ. Python still owns pipeline orchestration, image processing, ML inference, metadata
extraction, and archive generation.
The Hard Part: Preserving contract parity with an existing Python worker runtime and Alembic-managed schema. The first migration attempt exposed several real integration failures:
- Schema drift between GORM models and the Alembic-backed
jobstable - Dropped validation rules that the Python API had enforced
- Incorrect RabbitMQ publishing semantics when trying to use
gocelery - Lost request metadata propagation into Celery tasks
- An unregistered router task that caused accepted jobs to sit in
PENDING - Runtime config mismatch from Python's
postgresql+asyncpg://DSN format
The Fix: Treat the migration as a
compatibility problem, not a rewrite fantasy. I kept Alembic as the schema
authority, aligned the Go model with the existing database contract, restored backend
validation parity, removed gocelery, and published Celery-compatible AMQP
envelopes directly to the queue the Python workers already consumed. A dedicated router task
on the Python side lets Go hand off a small, stable payload while the worker layer continues
building the full Celery chord internally.
The Problem: Fixed replica counts meant the system either wasted money at
idle or dropped jobs under burst. Pod-level scaling alone wasn't enough — when all pods
maxed out on one node, new pods just sat Pending.
The Fix: Two-layer autoscaling:
- Pod scaling: API scales via HPA on CPU/memory. Standard workers scale via KEDA on RabbitMQ queue depth — the queue drives the workers, not CPU noise.
- Node scaling: Cluster Autoscaler watches for
unschedulable pods and grows the workload ASG. Required Terraform changes for ASG
autodiscovery tags, IAM permissions, and in-cluster RBAC for
jobs.batch,volumeattachments, andconfigmaps.
Live Proof: A bounded stress run showed workers
scaling 1 → 2 → 3 via KEDA, API scaling 1 → 3 via HPA, and a
controlled unschedulable probe validated full ASG scale-out from 1 → 2 workload
nodes with automatic K3s agent registration.
The Problem: Real autoscaling exposed deploy-path failures: K3s API flaps
during disruptive events, and Helm releases get stuck in pending-upgrade,
poisoning every subsequent deploy.
The Fix: API readiness gating before and after
disruptive steps. Retry wrappers around kubectl apply. Helm busy-release retry
logic with automatic rollback to the last stable revision when a release is stuck pending.
One live KEDA release had to be manually recovered before codifying the recovery path.
The Problem: RabbitMQ on local-path storage was coupled to the
infra node. Any infra-node replacement would strand the broker volume and make rotations
disruptive.
The Fix: Installed the AWS EBS CSI driver, added a
gp3 StorageClass, and moved the RabbitMQ StatefulSet PVC target. Hit two
independent failure modes during migration: Kubernetes rejected the in-place
volumeClaimTemplates patch (immutability), and EBS CSI couldn't create volumes
due to ec2:CreateVolume IAM denials. Fixed by explicit maintenance migration
paths and inline IAM policy expansions.
Production Stress Test Results
A formal in-region (us-east-1) performance suite replaced ad-hoc stress runs.
Temporary EC2 load-generator, orchestrated scenario matrix, pre/post cluster snapshots, and
runtime log collection across all components.
| Scenario | Submitted | HTTP p95 | Fail Rate |
|---|---|---|---|
| Baseline (30 VUs, 10m) | 3,779 | 651ms | 0.00% |
| Spike (120 VUs, 5m) | 6,119 | 8,539ms | 3.65% |
| Retry Storm (60 VUs, 5m) | 6,461 | 3,618ms | 0.22% |
| Starvation Mix (8m) | 5,645 | 6,137ms | 1.33% |
Key findings: Stable and production-acceptable at moderate sustained load.
Under aggressive concurrency, API probe timeouts and app-node CPU saturation (100%) are the
primary degradation drivers. ML queue wait reaches ~2.5h under sustained heavy-job pressure,
confirming the need for dedicated ML capacity. Scale ceilings (max=3) are the
hard bottleneck — raising them is the highest-impact remediation.
Architecture
flowchart TD
subgraph AWS["AWS Cloud"]
ALB[ALB Ingress]
RDS[(PostgreSQL 16\nRDS)]
S3[(S3 Buckets)]
EBS[(EBS gp3 PVC)]
subgraph K3s["K3s Cluster"]
subgraph InfraNode["Infra Node (On-Demand m7i-flex.large)"]
ControlPlane[K3s Control Plane]
RMQ(RabbitMQ)
REDIS(Redis)
BEAT(Celery Beat)
ALBCtrl(ALB Controller)
CEXP(Celery Exporter)
KEDA(KEDA Operator)
end
subgraph WorkloadNode["Workload Nodes (Spot m7i-flex.large, max 3)"]
API(Go API Edge)
W_STD(Celery Worker Standard)
W_ML(Celery Worker ML)
NTH(AWS Node Termination Handler)
end
ALLOY(Alloy DaemonSet)
CA(Cluster Autoscaler)
end
end
GrafanaCloud["☁️ Grafana Cloud (Logs, Metrics, Traces)"]
User[Frontend User] --> ALB
ALB --> API
API -.->|Idempotency/Locking| REDIS
API -.->|Job Tracking| RDS
API -->|Publishes AMQP| RMQ
API -->|Uploads Image| S3
RMQ -->|Consumes| W_STD
RMQ -->|Consumes| W_ML
RMQ -.->|Queue Depth| KEDA
KEDA -.->|Scales| W_STD
W_STD -->|Processes| S3
W_ML -->|Infers| S3
W_STD -.->|Updates Status| RDS
W_ML -.->|Updates Status| RDS
RMQ -.->|State| EBS
BEAT -->|Schedules| RMQ
CEXP -.->|Reads Events| RMQ
ALLOY -->|Scrapes| API
ALLOY -->|Scrapes| CEXP
ALLOY ==>|Ships Telemetry| GrafanaCloud
NTH -.->|Cordons & Drains| ControlPlane
CA -.->|Scales Workload ASG| WorkloadNode
Runtime Topology
- Ingress & API: AWS ALB Controller routing to K3s Pods running the Go HTTP edge. Go handles validation, S3 uploads, Postgres writes, and AMQP publishing.
- Worker Layer: Python Celery workers consume from RabbitMQ, owning all image processing, ML inference, and pipeline orchestration.
- Message Broker: RabbitMQ StatefulSet with Dead Letter Exchanges for failures.
- State & Locking: Redis for transient locks and PostgreSQL 16 on AWS RDS for persistent tracking.
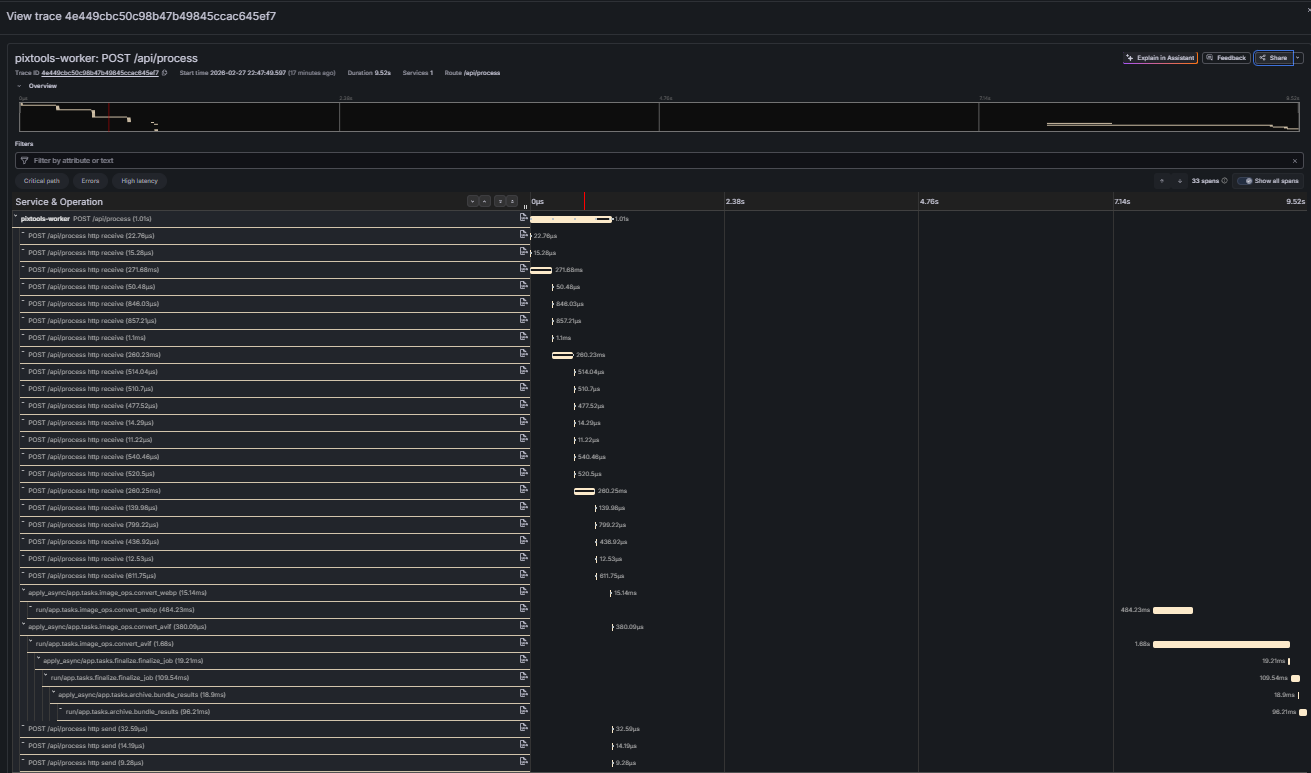
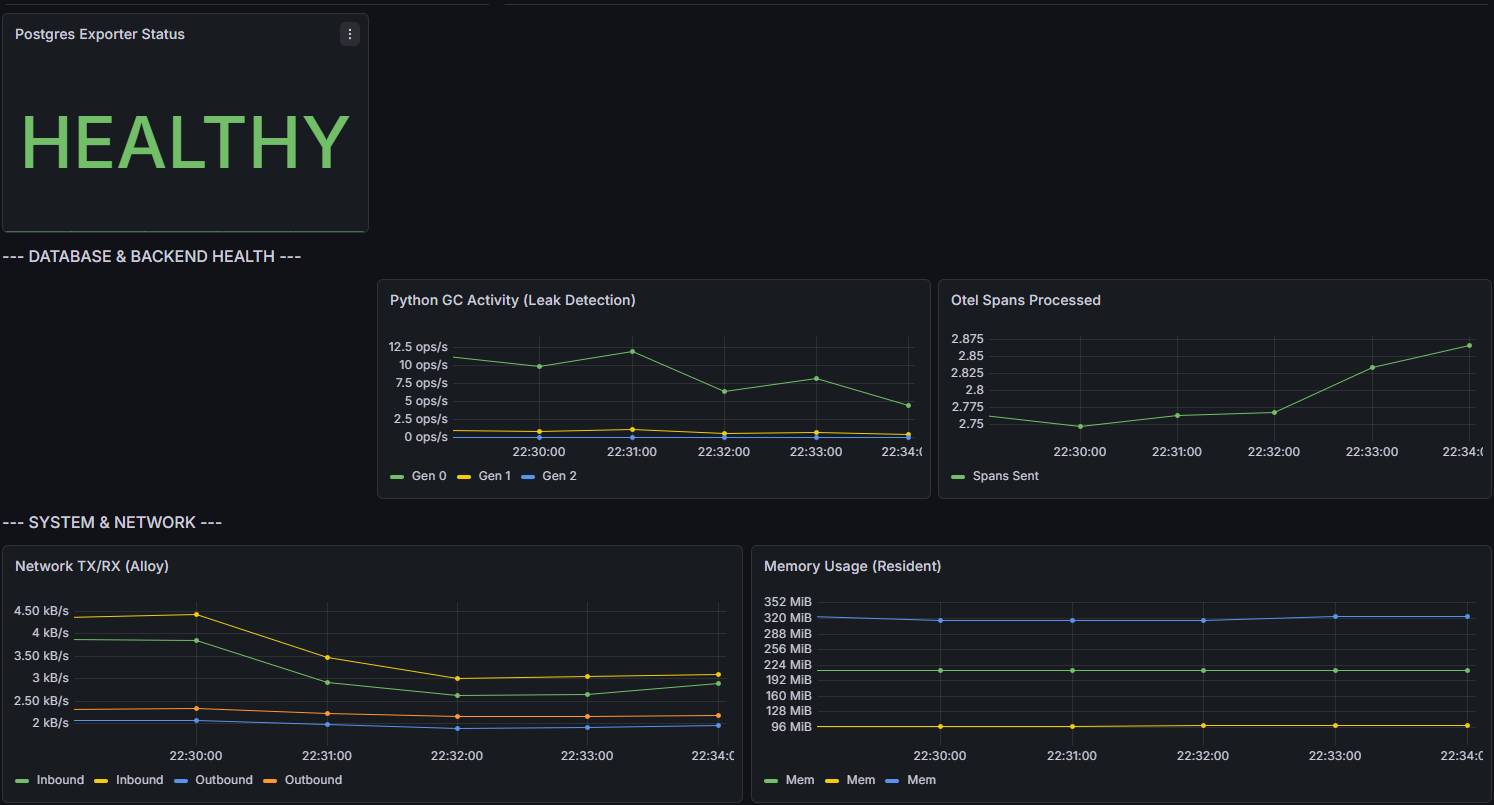
- Data Plane: K3s Agents on scalable
m7i-flex.largespot instances. - Observability: Alloy → Grafana Cloud LGTM. Metrics, Loki logs, and Tempo openTelemetry traces via a single DaemonSet.